


 当前位置:
当前位置:水平定向钻进跟踪/导向仪中地下传感发射探头
[09-12 18:40:59] 来源:http://www.88dzw.com 传感技术 阅读:8436次
文章摘要:2.4电源模块的设计地下传感发射探头体积小。由结构设计知,探头只能靠两节二号电池供电。为满足地下长时间工作的需要,探头电源模块的设计非常重要。此电源模块需要给传感器部分、微控制器部分和功率放大部分分别提供+3.3V、+2V、±5V和±12V的电压,并且+5V需提供50mA的输出电流,±12V的输出电流需达到80mA。考虑到成本、效率、输出纹波、噪声及静态电流等问题,最终选择MAXIM公司生产的几款高集成度、高转换效率的可控型DC-DC转换器,将两节锂电池的输入转换为所需的电压值。当传感器、功放等单元处于休眠时,MSP430F149可同时关断相关电源转换模块,以达到省电的目的。通过实验测试证明,
水平定向钻进跟踪/导向仪中地下传感发射探头,标签:传感技术知识,传感器与检测技术,http://www.88dzw.com2.4电源模块的设计
地下传感发射探头体积小。由结构设计知,探头只能靠两节二号电池供电。为满足地下长时间工作的需要,探头电源模块的设计非常重要。此电源模块需要给传感器部分、微控制器部分和功率放大部分分别提供+3.3V、+2V、±5V和±12V的电压,并且+5V需提供50mA的输出电流,±12V的输出电流需达到80mA。考虑到成本、效率、输出纹波、噪声及静态电流等问题,最终选择MAXIM公司生产的几款高集成度、高转换效率的可控型DC-DC转换器,将两节锂电池的输入转换为所需的电压值。当传感器、功放等单元处于休眠时,MSP430F149可同时关断相关电源转换模块,以达到省电的目的。通过实验测试证明,探头可连续工作12个小时,电源模块的转换效率达80%以上。
3 软件设计
本系统中,MSP430F149作为主控制器,完成对传感器输出信号的采集、DSP的引导、电源模块的管理等工作,总体软件流程如图4所示。ADSP2189主要实现精确数字调制、同步以及相关的数字信号处理。
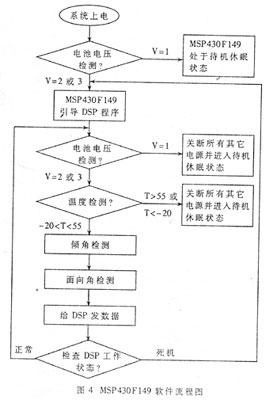 |
3.1电池电压检测
根据电池的特性曲线,通过ADCl2获取的电池电压分为3(强)一2(中)一1(弱)三档。当电池电压降至1档时,MSP430F149自动关断其它功能模块的电源,自身进入待机休眠状态。
3.2 MSP430F149与DSP通信
DSP引导:激活RESET,置MMAP=0和BMODE=1(选择IDMA引导);撤消RESET,通过IDMA接口装载ADSP2189程序。程序执行被堵塞,直到程序存储器的地址0写PM(0x0000)。ADSP2189响应IDMA控制信号并提供确认信号IACK。写PM(0x0000),开始DSP程序执行。
DSP存储器的读/写:由4个控制输入管脚选择。IDMA接口选择IS和地址锁存使能(IAL)有效时,ADSP2189将地址总线上的地址写入IDMA控制寄存器,被锁存的地址不能由主控制器读回。IDMA接口选择IS和读选通IRD有效时,ADSP2189将IDMA控制寄存器所指的存储单元内容输出到IDMA数据总线上。IDMA接口选择IS和写选通IWR有效时,ADSP2189将数据总线上的输人数据写到IDMA控制寄存器所指的存储单元中。访问应答IACK确认数据读/写操作的完成,作为IDMA接口忙的指示信号。
DSP状态检测:将待发射数据以固定的格式存放在DSP的数据区,然后向DSP发中断;DSP接收到中断后,调制及发射过程中会引起DSP-FL0一MSP430F149-P4.2的电平变化。在1ms内若检测到变化,DSP工作正常;未检测到变化,DSP工作不正常,重新调用DSP程序引导模块。
3.3传感器检测
(1)倾角检测:在温度不变的情况下,单轴加速度计输出值与倾角的正弦值成线性关系,主要通过查表的方式得到倾角值,并运用最小二乘法进行相应的温度补偿。
(2)面向角检测:利用MSP430F149定时器的两个捕获/比较模块实现了对双轴加速度计的双脉宽输出的测量。
(3)温度检测:通过MSP430F149的I/O引脚直接访问温度传感器,读取温度值,并进行相应的判断。
此外,还设定了看门狗定时器,防止程序跑飞。
4系统安装误差软件修正
由于探头安装过程中轴线偏移以及相关基准线未能对准等,倾角传感器和面向角传感器总会产生一定误差。也就是说,当探头倾角及面向角处于绝对零位时,对应传感器测量结果并不是零值,存在一定的偏差,且不同探头的初始偏差也不相同。利用MSP430F149的程序存储器是Flash型可在线编程的特点,在整个系统装配完成后第一次上电时用软件实现误差修正。误差修正软件流程图如图5所示。
 |
Flash存储器由很多相对独立的段组成,主要分为信息存储区(A、B段)和主存储区,可在一个段中运行程序,而对另一个段进行擦除或写入数据等操作;主要用于保存用户程序或重要的数据、信息等一些掉电后不丢失的数据。应用程序在主存储区中,主要是对信息存储区中的A段进行擦除和写数据。 第一次上电时探头放置在特定的标定平台上,使探头倾角及面向角处于绝对零位。这时探头上电,运行主程序,传感器测得的数据即为因安装而形成的固定偏差。把测得的数据写入Flash存储模块中锁定,使以后程序不能再对此段程序存储单元进行改写,掉电后也不会被擦除。探头以后上电工作通过对特定存储单元数据进行判断,不再执行上述过程。但将传感器每次测量所得数据减去第一次上电所测偏差值,即得绝对测量值。在对Flash操作前先要停掉看门狗,防止操作期间看门狗定时器溢出。该子程序流程如图6所示。
- 上一篇:气敏传感器信号采集的研究
《水平定向钻进跟踪/导向仪中地下传感发射探头》相关文章
- › 水平定向钻进跟踪/导向仪中地下传感发射探头
- 在百度中搜索相关文章:水平定向钻进跟踪/导向仪中地下传感发射探头
- 在谷歌中搜索相关文章:水平定向钻进跟踪/导向仪中地下传感发射探头
- 在soso中搜索相关文章:水平定向钻进跟踪/导向仪中地下传感发射探头
- 在搜狗中搜索相关文章:水平定向钻进跟踪/导向仪中地下传感发射探头