


 当前位置:
当前位置:基于Atmegal6L单片机的智能小车的设计与制作
[09-12 16:04:34] 来源:http://www.88dzw.com 单片机学习 阅读:8782次
文章摘要: 1.3 单片机控制模块采用Atmel公司的Atmegal6L单片机可对小车进行控制,该单片机具有32个功能强大的可编程I/O接口和4个PWM通道,并具有八路十位ADC,可对小车进行实时控制。该单片机的PC0~PC7八个端口可与光电传感模块的八个光电探头相连。设探头检测的逻辑实际值为P,假定值N,车轮的运动状态分别为forward-move、right-move、leftmove、hard-right-move、hard-left-move,通过对实际值P与假定值N(0b0011-1100)的比较,可得出如表2所列的Atmegal6L单片机的控制模块参数表,其中x为无关项。设计时,可将
基于Atmegal6L单片机的智能小车的设计与制作,标签:单片机开发,单片机原理,单片机教程,http://www.88dzw.com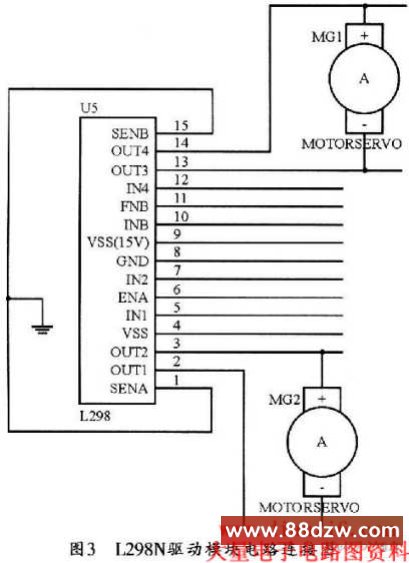
1.3 单片机控制模块
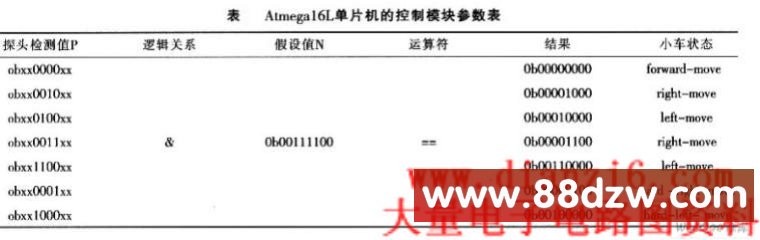
采用Atmel公司的Atmegal6L单片机可对小车进行控制,该单片机具有32个功能强大的可编程I/O接口和4个PWM通道,并具有八路十位ADC,可对小车进行实时控制。该单片机的PC0~PC7八个端口可与光电传感模块的八个光电探头相连。设探头检测的逻辑实际值为P,假定值N,车轮的运动状态分别为forward-move、right-move、leftmove、hard-right-move、hard-left-move,通过对实际值P与假定值N(0b0011-1100)的比较,可得出如表2所列的Atmegal6L单片机的控制模块参数表,其中x为无关项。设计时,可将Atmegal6L的PD2~PD3分别连接带码盘的两个光电对管,以用于精确测量车轮的转向与位移;PD5和PD4可分别连在电机驱动模块的使能端ENA和ENB。PDl、PD0、PD6和PD7分别于电机驱动模块的INl、IN2、IN3、IN4相连,INl、IN2口一般用于PWM的输入,以便利用PWM调速法,即由单片机输出一系列频率固定的方波,并通过功率放大器来驱动电机,再通过单片机编程来改变输出方波的占空比,这样就可改变加在电机上的平均电压,从而改变电机的转速。
2 智能小车的软件设计方案
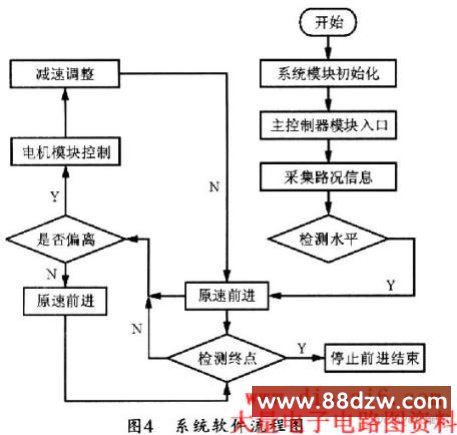
基于AVR单片机和C语言编程的系统软件流程图如图4所示。
3 结束语
本文着重讨论了光电传感器、单片机控制和稳压器原理及这几个模块之间的相互沟通与协调关系,本系统采用便宜的红外对管,并以具有强大功能的ATmagel6L单片机为主控制器,同时以L298N驱动芯片通过C语言程序编写调试软件,从而完成了能够智能循迹、自动避障、结构模块化、抗干扰能力强的智能小车的设计。该系统通过对小车的调试,能够使小车成功平稳地在任意给定的黑线上行驶,而且循迹效果很好,运行十分平稳,同时速度也很快,而且在拐弯处不会因速度大而产生离心现象。
智能小车在军事、民用、科研、航天探测领域已得到广泛的应用,它的发展与自动控制、单片机开发、控制算法的优化和微机存储处理速度有着密切的关系,很值得进一步的研究与探索。
《基于Atmegal6L单片机的智能小车的设计与制作》相关文章
- › 基于AT0600的GPS接收机射频前端电路图
- › 基于AT0600的GPS接收机射频前端电路
- › ATR01610典型应用电路(基于ATR0610的GPS接收机低噪声放大电路)
- › 基于ATmega128L的大容量MP3播放机
- › 基于ATmega128L与CC2420的无线传感器网络节点的研究与实现
- › 基于AT89C51单片机设计的简易智能机器人
- 在百度中搜索相关文章:基于Atmegal6L单片机的智能小车的设计与制作
- 在谷歌中搜索相关文章:基于Atmegal6L单片机的智能小车的设计与制作
- 在soso中搜索相关文章:基于Atmegal6L单片机的智能小车的设计与制作
- 在搜狗中搜索相关文章:基于Atmegal6L单片机的智能小车的设计与制作