


 当前位置:
当前位置:基于CAN总线的电动汽车控制系统设计
[09-12 16:05:30] 来源:http://www.88dzw.com 单片机学习 阅读:8763次
文章摘要:四、方案设计1. 系统原理图图1为电动汽车CAN总线控制系统原理图图1 系统原理图该系统主要由驱动控制模块、再生制动控制模块、电机控制模块、能量管理模块、电池控制模块、仪表显示模块及故障诊断模块等组成。通过CAN实现各个控制模块间的信息通信。除了指令的发送和接收外,汽车的一些基本状态信息(如电机转速、电池荷电状态、车速等)是大部分控制单元必须获取的数据,控制单元采用广播方式向总线发送数据。如果在同一时刻所有控制单元都向总线发送数据,将发生总线上的数据冲突,因此,CAN总线协议提出了用标识符识别数据优先权的总线仲裁。表1给出了电动汽车电控单元接收及发送的数据类型及其它单元对这些信息共享的程序。表
基于CAN总线的电动汽车控制系统设计,标签:单片机开发,单片机原理,单片机教程,http://www.88dzw.com四、方案设计
1. 系统原理图

图1为电动汽车CAN总线控制系统原理图
图1 系统原理图
该系统主要由驱动控制模块、再生制动控制模块、电机控制模块、能量管理模块、电池控制模块、仪表显示模块及故障诊断模块等组成。通过CAN实现各个控制模块间的信息通信。除了指令的发送和接收外,汽车的一些基本状态信息(如电机转速、电池荷电状态、车速等)是大部分控制单元必须获取的数据,控制单元采用广播方式向总线发送数据。
如果在同一时刻所有控制单元都向总线发送数据,将发生总线上的数据冲突,因此,CAN总线协议提出了用标识符识别数据优先权的总线仲裁。表1给出了电动汽车电控单元接收及发送的数据类型及其它单元对这些信息共享的程序。
表1 电动汽车电控单元接收及发送的数据类型注:T-发送,R-接收

2. 模块单元电路框图
在对高速CAN上的节点进行硬件设计时采用通用扩展单元(UDU)。这样只需通过改变软件来实现各节点的不同功能,从而简化了硬件系统设计。
通用扩展单元结构如图2所示。
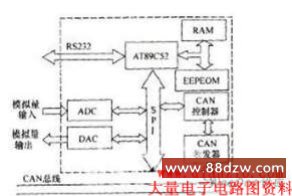
图2 通用扩展单元在通用扩展单元中选用AT89C52作微控制器
它是一个低电压、高性能的CMOS8位单片机,片内含8kB的可反复擦写的只读程序存储器(EPROM)和256B的随机存取数据存储器(RAM),兼容标准MCS251指令系统,片内置通用8位中央处理器和Flash存储单元,可适用于许多较复杂系统的控制应用场合。
CAN控制器采用Philips公司生产的SJA1000,它是应用于汽车和一般工业环境的独立CAN控制器,具有完成CAN高性能通信协议所要求的全部必要特性,具有简单总线连接的SJA1000可完成物理层和数据链路层的所有功能。它可以存储一条将在CAN总线上发送或接收的完整报文,另外具有64字节扩展接收缓冲区REFIFO,接收缓存更大,在微控制器处理一个报文的同时可以继续接收其它发来的报文。
总线收发器采用PCA82C250,它提供协议控制器和物理传输线路直接的接口,可以用高达1Mb/s的速率在2条有差动电压的总线电缆上传输数据。
最多挂接节点数可达110个。采用PCA82C250可以增大通信距离,提高系统瞬间抗干扰能力,降低射频干扰。PCA82C250和SJA1000共同组成CAN总线的控制和接口电路。
3. 电池管理控制系统设计
蓄电池对电动汽车而言是影响整车性能的一个关键因素,它对续驶里程、加速性能和最大爬坡度等性能都会产生直接影响。电池控制系统主要是监控电池的工作状态(电池电压、电流和温度),管理电池的工作情况(避免出现过放电、过充、过热和单体电池之间电压严重不平衡现象)以便最大限度地利用电池的存储能力和循环寿命。其结构如图3。

图3 电池管理控制单元结构图
该系统主要实现以下功能。
(1)对主辅电池进行实时监控通过UDU采集主辅电池充放电过程中的电池电压、电流和电池温度,来监控电池的工作状况并进行故障诊断。
(2)UDU接收来自总线的汽车行驶状态数据根据汽车动力需求实时调整电动机转速及功率输出;当收到制动信息时,控制单元调控逆变器和电动机的动作,启动再生制动系统回收制动能量。
- 上一篇:一种单片式CMOS汽车电子调节器
《基于CAN总线的电动汽车控制系统设计》相关文章
- › 基于CAN总线的电池管理系统结构框图
- › 基于CAN总线的分布式位置伺服系统设计
- › 基于CAN总线的智能型温湿度采集系统设计
- › 基于CAN总线接口的红外检测系统的设计思路
- › 基于Cadence的高速PCB设计
- › 基于CAN核的四冗余通信板设计与仿真
- 在百度中搜索相关文章:基于CAN总线的电动汽车控制系统设计
- 在谷歌中搜索相关文章:基于CAN总线的电动汽车控制系统设计
- 在soso中搜索相关文章:基于CAN总线的电动汽车控制系统设计
- 在搜狗中搜索相关文章:基于CAN总线的电动汽车控制系统设计