


 当前位置:
当前位置:功率驱动器件与MCU/DSC的接口电路设计技巧
[09-13 16:53:35] 来源:http://www.88dzw.com 接口定义 阅读:8283次
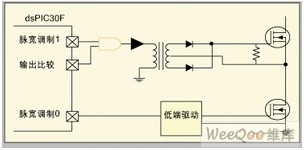
文章摘要:如果高端器件的栅极驱动必须保持连续,那么必须使用浮动电路来产生比直流总线电压高10 V至15 V的电压。我们可以采用充电泵电路,它的电压是相对高端晶体管的源极电压而言的。另一种方法则是用一个高频信号来调制栅极信号,这样在栅极驱动信号出现时,高频信号也会出现。在图2中,调制信号通过一只变压器耦合到晶体管的栅极和源极,并在变压器的次级经过整流产生栅极驱动电压。但是,这两种方法都会增加设计的成本。马达反馈信号马达和电源控制电路需要提供各种信号,这些信号视马达的类型及控制算法而定。采集一种反馈信号的方法很多。例如,许多马达控制算法需要知道负载中的相电流。测量相电流的最简单方法是使用霍尔效应电流传感器。
功率驱动器件与MCU/DSC的接口电路设计技巧,标签:接口技术,微机原理与接口技术,http://www.88dzw.com 如果高端器件的栅极驱动必须保持连续,那么必须使用浮动电路来产生比直流总线电压高10 V至15 V的电压。我们可以采用充电泵电路,它的电压是相对高端晶体管的源极电压而言的。另一种方法则是用一个高频信号来调制栅极信号,这样在栅极驱动信号出现时,高频信号也会出现。在图2中,调制信号通过一只变压器耦合到晶体管的栅极和源极,并在变压器的次级经过整流产生栅极驱动电压。但是,这两种方法都会增加设计的成本。
马达反馈信号
马达和电源控制电路需要提供各种信号,这些信号视马达的类型及控制算法而定。采集一种反馈信号的方法很多。例如,许多马达控制算法需要知道负载中的相电流。测量相电流的最简单方法是使用霍尔效应电流传感器。霍尔传感器与驱动马达的高压电路完全隔离,它使用逻辑电路的电源,连接到MCU或者DSC中的A/D转换器时所需元件极少,缺点则是成本高。
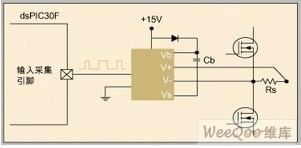
测量相电流的另一个方法是采用PWM电流传感器IC。它测量一只与负载串联、对电流敏感的电阻器上的电压降。经过设计,这些器件基于功率输出级输出的满幅电压上下浮动,并采用自举电源供电。这种传感器的输出是PWM信号,它的占空比与感应电阻器中的电流成正比,并有两种方法与微控制器连接。第一种方法是采用一个RC滤波器网络对PWM的输出信号滤波,并把它转换成模拟信号。这个方法的缺点是,控制算法要求滤波器输出中没有纹波和相位误差。此外使用滤波器也增加了设计的成本。另外一个方法是直接把PWM的输出信号送到微控制器上的输入采集外设引脚上(图3)。这一外设在输入信号处于上升沿和下降沿(或两者)时采集数字时基信号的脉冲数,并用应用软件进行处理,从而计算出输入信号的周期、频率或者占空比。
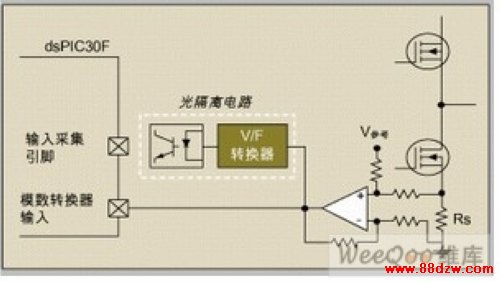
当控制器上有“输入采集”引脚时,我们也可以在设计中加上隔离式模拟放大器,通过数字转换来得到相电流。用V/F或者电压/PWM转换器把模拟信号转换成数字信号。模拟信号可用数字式光耦合器通过隔离电路传到控制器。与模拟隔离方案相比,V/F转换器+光耦合器方案成本较低。
测量相电流的第三个方法是,在电源级电路的每个低端晶体管源极串联一只感应电阻器(图4),用差动放大器来放大电阻器两端的电压,然后送入A/D转换器的输入端。在使用这个方法时,A/D转换器必须与控制晶体管的PWM信号同步。为了得到精确的电流信号,应当在电源输出级中的低端晶体管开通时进行测量。在使用分流电阻进行测量时,内建有A/D同步逻辑电路的控制器很有用。
进行软件开发
用传统的仿真器来开发马达控制软件比较困难。使用仿真器时,设计人员可以在任何时刻停止应用软件的执行,以便查看寄存器值以及代码执行情况。但是,在某些时刻停止软件执行其实会对马达和电源电路造成极大影响。
在停止软件执行时,PWM 控制值不再更新,马达和电源输出级电路中便会出现较大的直流电流。为了解决这一问题,应该通过仿真器将PWM信号置于不会损坏负载的状态。例如,dsPIC30F系列PWM外设部件可在仿真器停止时将所有PWM输出引脚设置在低电平状态。这时所有输出器件都关断,马达慢慢停下来。在产品开发过程中,加入额外的硬件保护功能十分有用。这些功能可在产品开发过程出现软件错误时保护硬件不受损坏,并可在正式生产时去除以节省成本。这些功能包括限流、总线电压过载保护及在高、低端晶体管同时导通时关机。
本文小结
在选定某种控制器后,我们便要选择相应的元件来连接控制器和电源输出级电路。通用MCU能够满足算法需求,但是它可能不具备与马达控制直接相连的外设部件。我们必须在接口电路中增加相应硬件,以保护输出器件或处理反馈信号。(作者:Steve Bowling)
《功率驱动器件与MCU/DSC的接口电路设计技巧》相关文章
- › 控制和功率驱动电路图
- › 桥式功率驱动电路图
- › 功率驱动电路图
- › 8位可定址DMOS功率驱动器参数及应用
- › 功率驱动器件与MCU/DSC的接口电路设计技巧
- 在百度中搜索相关文章:功率驱动器件与MCU/DSC的接口电路设计技巧
- 在谷歌中搜索相关文章:功率驱动器件与MCU/DSC的接口电路设计技巧
- 在soso中搜索相关文章:功率驱动器件与MCU/DSC的接口电路设计技巧
- 在搜狗中搜索相关文章:功率驱动器件与MCU/DSC的接口电路设计技巧