


 当前位置:
当前位置:由LT1014等构成的电动机运行控制电路
[11-20 13:40:18] 来源:http://www.88dzw.com 基本电路电路图 阅读:8412次
文章摘要: 图是由LT1014等构成的电动机运行控制电路。电动机转速电压由电位器RP1的中间抽头进行设定。为了使电动机的转速稳定,来自电流检测电阻R1与电流成比例的正反馈电压由RP3进行调节,并由Al将其与转速设定电压相加。RP3的最佳调整可以完全抵消电动机的寄生电阻,使电动机转距-转速特性为硬特性。电动机转速控制性能不取决于机械加载,而是受到驱动电路电压的限制。 在Al输出综合控制信号的响应方面,电动机驱动的调节由差分放大器A3或A4完成,这取决于要求的电动机驱动电压的极性,以及由触发器A2的状态表明的电动机的转向。对于电动机正转,A2输出低电平,由A4控制电动机的转向,其工作过程如
由LT1014等构成的电动机运行控制电路,标签:电路图讲解,电路图练习,http://www.88dzw.com 图是由LT1014等构成的电动机运行控制电路。电动机转速电压由电位器RP1的中间抽头进行设定。为了使电动机的转速稳定,来自电流检测电阻R1与电流成比例的正反馈电压由RP3进行调节,并由Al将其与转速设定电压相加。RP3的最佳调整可以完全抵消电动机的寄生电阻,使电动机转距-转速特性为硬特性。电动机转速控制性能不取决于机械加载,而是受到驱动电路电压的限制。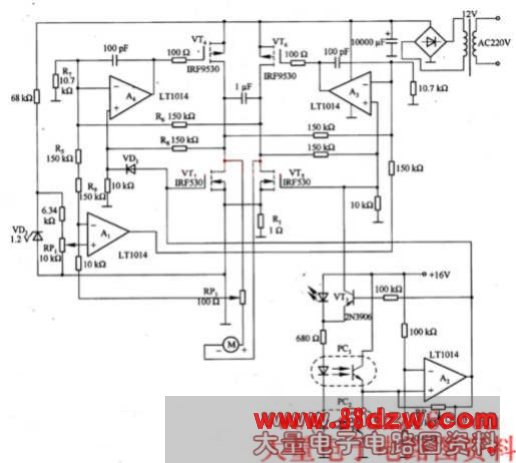
在Al输出综合控制信号的响应方面,电动机驱动的调节由差分放大器A3或A4完成,这取决于要求的电动机驱动电压的极性,以及由触发器A2的状态表明的电动机的转向。对于电动机正转,A2输出低电平,由A4控制电动机的转向,其工作过程如下:A2输出低电平使VT3导通,将VT5栅极电位抬高并使其导通,电动机的负端通过Rl接地。同时,VT3将同样的电压加到A3的同相输大端,其输出变为高电平使VT6栅极电位变正而截止。这就防止了VT5和VT6直通的可能性。然后,A4通过R5一R9微分网络对电动机两端电压进行精确检测,并通过功率MOSFET管VT4进行调整。
这样,电动机以RP3设定的转速运行,直到光耦合器PCl检测到正转限制的机械负载为止。这时,光糯合器PCl导通,其电压超过反馈电位器RP2设定的竭值,将A2同相输入端电位抬高,转向控制触发器A2的输出状态恢复。这时也输出高电平使VT7导通,VDl正向偏置,去除了A4和VT4的控制环路。
同时,VT3截止,VT5和A3也截止,电动机的驱动电压极性变成反向,调整转速变为反向运行,直到PC2检测到反转限制的机械负载为止。
Tag:基本电路电路图,电路图讲解,电路图练习,电子电路图 - 基本电路电路图
- 上一篇:负戴实验控制电路
《由LT1014等构成的电动机运行控制电路》相关文章
- › 由LT1014等构成的电动机运行控制电路
- 在百度中搜索相关文章:由LT1014等构成的电动机运行控制电路
- 在谷歌中搜索相关文章:由LT1014等构成的电动机运行控制电路
- 在soso中搜索相关文章:由LT1014等构成的电动机运行控制电路
- 在搜狗中搜索相关文章:由LT1014等构成的电动机运行控制电路
编辑推荐
分类导航
最新更新
热门排行
- ・ 晶体管双稳态触发电路
- ・ 可控硅驱动放大电路
- ・ KJ001的典型应用电路图
- ・ 由可控硅过零触发器KJ009组成的应用电路图
- ・ 固体继电器SSR
- ・ 负戴实验控制电路
- ・ 用可控硅控制的功放动态电源电路图
- ・ 光控晶闸管
- ・ 固态继电器简介
- ・ 可控硅交流调压器电路图