


 当前位置:
当前位置:基于AT91RM9200的CAN智能节点设计
[09-12 16:04:53] 来源:http://www.88dzw.com 单片机学习 阅读:8751次
文章摘要:2 软件设计CAN智能节点软件设计主要包括2个方面:CAN通信和CAN节点功能模块的软件设计。CAN节点功能模块软件的实现因需求而异,在此不做介绍。本文着重介绍CAN通信软件的设计,它主要由3部分组成:CAN初始化、CAN发送数据、CAN接收数据。2.1 CAN初始化由图2(a)可知,CAN初始化主要包括PIOA端口初始化、SPI初始化、MCP2510初始化、中断初始化。现分别介绍如下:(1)PIOA端口初始化。由于AT91RM9200每个引脚可配置为通用功能I/O线或与1个或2个外设I/O复用的I/O线。因此必须通过软件配置PIOA端口:将PA0,PAl,PA2,PA4引脚分别定义为MISO
基于AT91RM9200的CAN智能节点设计,标签:单片机开发,单片机原理,单片机教程,http://www.88dzw.com2 软件设计
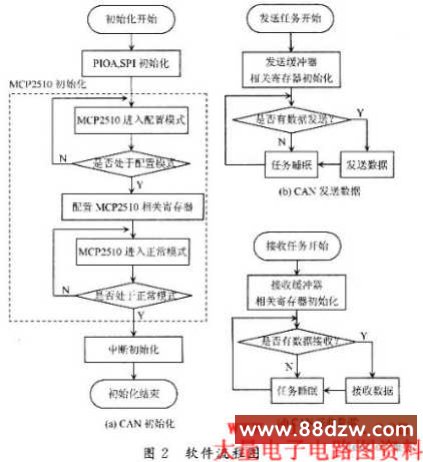
CAN智能节点软件设计主要包括2个方面:CAN通信和CAN节点功能模块的软件设计。CAN节点功能模块软件的实现因需求而异,在此不做介绍。本文着重介绍CAN通信软件的设计,它主要由3部分组成:CAN初始化、CAN发送数据、CAN接收数据。
2.1 CAN初始化
由图2(a)可知,CAN初始化主要包括PIOA端口初始化、SPI初始化、MCP2510初始化、中断初始化。
现分别介绍如下:
(1)PIOA端口初始化。由于AT91RM9200每个引脚可配置为通用功能I/O线或与1个或2个外设I/O复用的I/O线。因此必须通过软件配置PIOA端口:将PA0,PAl,PA2,PA4引脚分别定义为MISO,MOSI,SPCK,NPCSl,从而完成CAN智能节点SPI接口的定义;将PA3引脚定义为IRQ5,从而完成CAN智能节点中断信号的定义。
(2)SPI初始化。通过PIOA端口初始化,只是完成SPI接口的引脚定义。为了使SPI接口能够正常工作,首先配置电源管理控制器(PMC)以使能SPI时钟;如果允许SPI中断请求,必须对高级中断控制器(AIC)进行配置;最后通过SPI的模式寄存器SPI_MR。指定SPI为主机模式、固定外设选择、SPI时钟为MCK、片选信号NPCSl有效;通过SPI的片选1寄存器SPI_CSRl指定SPCK时钟极性、时钟相位以支持MCP2510的(O,O)或(1,1)的SPI模式,指定SPI接口以8位数据进行传输匹配MCP2510的命令及数据格式,指定SPI的串行时钟波特率以匹配与MCP2510的通信。
(3)MCP2510初始化。在完成PIOA端口、SPI初始化的基础上,即可按照图2(a)虚线框中的流程进行MCP2510初始化:首先必须使MCP2510进入配置模式;然后对MCP2510相关寄存器(位定时配置寄存器、接收滤波寄存器、接收屏蔽寄存器、引脚控制和状态寄存器)进行配置;最后使MCP2510进入正常模式。根据MCP2510提供的SPI命令集(读指令、写指令、请求发送指令、状态读指令、位修改指令、复位指令),可以通过对
AT91RM9200的SPI接收数据寄存器SPI_RDR,SPI发送数据寄存器SPI_TDR,SPI状态寄存器SPI_SR的操作实现相应的函数:McpRdByte(),Mcp-WrByte(),WriteRTS(),McpRdStatus(),BitModify(),McpReset()。软件通过这些基本的指令函数完成MCP2510相关寄存器的配置。
(4)中断初始化。通过AT91RM9200的高级中断控制器(AIC),首先配置IRQ5中断的优先级为最高,中断触发类型为下降沿触发;接着将中断服务程序IRQ5_ISR()的地址设置到中断向量寄存器;最后使能IRQ5中断。
2.2 CAN发送数据
当完成CAN的初始化后,即可使用3个发送缓冲器发送报文数据。由图2(b)可知:在发送数据前,首先通过发送缓冲器N(N=O,1,2)控制寄存器TXBNCTRL终止报文发送,并设定发送缓冲器N报文发送的优先级;接着通过发送缓冲器N标准标识符高低位寄存器TXBNSIDH,TXBNSIDL设定标准标识符,如果报文采用扩展标识符,还需通过发送缓冲器N扩展标识符高低位寄存器TXBNEID8,TXBNEID0设定扩展标识符。当发送缓冲器N相关寄存器初始化后,发送任务处于休眠等待状态。一旦有数据需要发送,即可将需要发送的数据(每次最多8 B)存放在发送缓冲器N的数据寄存器TXBND7~TXlBND0,并且通过送缓冲器N的数据长度寄存器TXBNDLC设定每次发送的字节数,最后通过发送缓冲器N控制寄存器TXB-NCTRL启动数据发送。当数据发送完毕,发送任务又处于休眠等待状态。
2.3 CAN接收数据
当完成CAN的初始化后,即可使用两个接收缓冲器接收报文数据。由图2(c)可知:在接收数据前,首先通过接收缓冲器N(N=0,1)控制寄存器RXBNCTRL,设定接收缓冲器的工作模式为接收符合滤波条件的所有带扩展标识符或标准标识符的有效报文;如果允许MCP2510接收中断,还需通过中断使能寄存器CANINTE允许接收缓冲器N装入报文时产生中断。
当接收缓冲器N相关寄存器初始化后,接收任务处于休眠等待状态。当接收任务通过轮询或中断方法发现需要接收数据时,它通过接收缓冲器N标准标识符高低位寄存器RXBNSIDH,RXBNSIDL获取标准标识符;如果收到的报文是扩展帧,可通过RXBNSIDL及接收缓冲器N扩展标识符中间、低位寄存器RXBNEID8,RXBNEIDO获取扩展标识符;通过接收缓冲器N数据长度码寄存器RXBNDLC获取接收到的数据字节个数,进而通过接收缓冲器N数据寄存器RBNDm7~RBNDm0获取接收报文中的数据信息。当数据接收完毕,接收任务又处于休眠等待状态。
《基于AT91RM9200的CAN智能节点设计》相关文章
- › 基于AT0600的GPS接收机射频前端电路图
- › 基于AT0600的GPS接收机射频前端电路
- › ATR01610典型应用电路(基于ATR0610的GPS接收机低噪声放大电路)
- › 基于ATmega128L的大容量MP3播放机
- › 基于ATmega128L与CC2420的无线传感器网络节点的研究与实现
- › 基于AT89C51单片机设计的简易智能机器人
- 在百度中搜索相关文章:基于AT91RM9200的CAN智能节点设计
- 在谷歌中搜索相关文章:基于AT91RM9200的CAN智能节点设计
- 在soso中搜索相关文章:基于AT91RM9200的CAN智能节点设计
- 在搜狗中搜索相关文章:基于AT91RM9200的CAN智能节点设计