


 当前位置:
当前位置:uC/OS-II在MSP430单片机芯片上实现RTOS的问题分析
[09-12 16:05:16] 来源:http://www.88dzw.com 单片机学习 阅读:8251次
文章摘要:为了达到这个目的,单片机芯片必须具备以下2个条件。首先,单片机芯片必须有一个通用寄存器和相应的指令能够模仿堆栈指针SP的功能,即能实现软堆栈。在MSP430系列单片机中有以下指令可以仿真SP的功能(把R4作为中断堆栈指针使用):MOV @R4+,SP ;将R4所指向地址中的内容存入SP;中,同时R4中内容加2MOV SP,0(R4) ;将SP中的内容存入R4所指向的地址中MOV @R4+,PC ;将R4所指向地址中的内容存入PC;中,同时R4中内容加2其次,作为模拟中断堆栈指针的寄存器R4,必须在中断之外的任何情况下不被使用。因为,此时的R4必须时刻保持在中断堆栈的顶部,如果改变它的值,就会改
uC/OS-II在MSP430单片机芯片上实现RTOS的问题分析,标签:单片机开发,单片机原理,单片机教程,http://www.88dzw.com为了达到这个目的,单片机芯片必须具备以下2个条件。
首先,单片机芯片必须有一个通用寄存器和相应的指令能够模仿堆栈指针SP的功能,即能实现软堆栈。在MSP430系列单片机中有以下指令可以仿真SP的功能(把R4作为中断堆栈指针使用):
MOV @R4+,SP ;将R4所指向地址中的内容存入SP;中,同时R4中内容加2
MOV SP,0(R4) ;将SP中的内容存入R4所指向的地址中
MOV @R4+,PC ;将R4所指向地址中的内容存入PC;中,同时R4中内容加2
其次,作为模拟中断堆栈指针的寄存器R4,必须在中断之外的任何情况下不被使用。因为,此时的R4必须时刻保持在中断堆栈的顶部,如果改变它的值,就会改变中断堆栈的结构。一般这个要求是由所使用的编译器来保证的,在我们所使用的IAR编译器中,有一个选项可以避免使用R4和/或R5。
具体设计时,我们在uC/OS-II每个任务的TCB(任务控制块)结构中加入以下几项:
TSP--任务堆栈指针。发生中断后,指向该任务的任务堆栈的顶部。
ISP--中断堆栈指针。如果在中断中发生任务切换,指向该任务在中断堆栈所保存状态的顶部。
FromInt标志--是否来自中断标志。用来判断该任务的状态是保存在中断堆栈中(为1),还是保存在任务堆栈中(为0)。
下面假设一个普通任务1在执行过程发生中断,对它在中断执行过程中可能出现的几种情况进行分析。
(1)在普通任务1运行时引发中断,在中断中没有激活更高优先级的任务,而是正常结束中断,继续执行任务1,如图2所示。
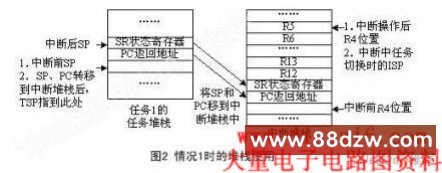
开始中断:将在中断发生时保存在当前任务堆栈的SR和PC移到中断堆栈中保存,同时 SP回到中断前的位置并将它保存到该任务TCB中的TSP中(这是为了在中断结束后,保持任务堆栈的连续性),然后将SP指到目前中断堆栈的顶部,按照自定义堆栈结构的顺序依次将所有寄存器都保存到中断堆栈中。保存的过程中R4必须与SP保持同步变化,同时将FromInt标志置l。
退出中断:由于没有激活更高优先级的任务,所以在中断任务完成后,将按正常的顺序退出中断,即将保存在中断堆栈中的寄存器推出堆栈,将FromInt标志置0,SP重新指向该任务的任务堆栈中,最后,将PC指针指向中断前的返回地址,继续程序运行。
(2)在普通任务1运行时引发中断,在中断中激活更高优先级的任务2。中断结束时由任务调度器调度去执行更高优先级的任务2,没有返回普通任务1。
当执行任务2时,任务调度器会将任务2保存在自己任务堆栈中的状态恢复并执行任务2。执行完后,如果没有激活更高优先级的任务,那么按照优先级高低的原则,调度器将调度执行任务1。通过判断任务1的TCB中的FromInt标志,可以知道任务1的状态是保存在任务堆栈中还是中断堆栈中,从而可以将其状态恢复,继续运行。
(3)在普通任务1运行时引发中断,在中断中激活更高优先级的任务2,执行任务2时又发生中断。
由于uC/OS-II是严格按照优先级抢占式原则进行任务调度的,所以将任务状态保存在中断堆栈顶部的任务的优先级一定比状态保存在它下面的任务的优先级高。在执行时,是由中断堆栈的顶部向底部顺序执行。在这种假设中,一定先执行任务2,然后执行任务1,如图3所示。
(4)在普通任务1运行时引发中断,在中断中激活更高优先级的任务2。在执行任务2时又发生中断,在中断过程中任务2由于等待信号量而被挂起。
这种情况在系统最初设计时已经被禁止,在中断中不允许使用信号量将中断挂起。
(5) 在普通任务1运行时引发中断,在中断中激活更高优先级的任务2。在执行任务2时又发生中断,中断中激活更高优先级的任务3。中断结束时由任务调度器调度去执行更高优先级的任务3。
这种情况与讨论的情况2是一样的。
(6)高优先级任务2被更高优先级的任务3中止,在任务3运行完后,任务调度器将直接调度执行任务1(按照优先级调度)。
《uC/OS-II在MSP430单片机芯片上实现RTOS的问题分析》相关文章
- › 在51系列单片机上移植uCOS-II
- 在百度中搜索相关文章:uC/OS-II在MSP430单片机芯片上实现RTOS的问题分析
- 在谷歌中搜索相关文章:uC/OS-II在MSP430单片机芯片上实现RTOS的问题分析
- 在soso中搜索相关文章:uC/OS-II在MSP430单片机芯片上实现RTOS的问题分析
- 在搜狗中搜索相关文章:uC/OS-II在MSP430单片机芯片上实现RTOS的问题分析