


 ��ǰλ�ã�
��ǰλ�ã�����PIC��Ƭ���ķ���������Ķ������
[09-12 16:05:35] ��Դ��http://www.88dzw.com ��Ƭ��ѧϰ �Ķ���8738��
����ժҪ�� ����������ʵ��ƽ̨���ڽ������ͱ����ʵ��ѧ��ͬ����֧�ֵ�һ����Ҽ���ѧ��������ʵ��ƻ�����Ŀ����һ�����⡢�����硢���塢������һ���ʵ��ƽ̨���о����ݰ����������������е�ṹ���о����Ƽ�Ч�ʵ��о��Լ��������ܵ��о���1. ����������ƽ̨��飺��������Ļ�����ģ��������������Σ�ͷ�����ø��Խṹ�����ϲ��ϡ�����״���������ͣ�ģ��������ͷ����״�ʹ�С����������ͷ���ڲ��ռ��ﰲװ��Դ�����Ƶ�·��������ͷ�������۴�����ͷǰ����ƫ�²లװ��3 �����������������һ��̽����ǰ������������Ĵ��������磬��������������ϵĹ��ܡ�ʹ�����Ͻ���������Ǽܰ��������������������Ǽ�֧�������ڶ������
����PIC��Ƭ���ķ���������Ķ������,��ǩ����Ƭ������,��Ƭ��ԭ��,��Ƭ���̳�,http://www.88dzw.com����������ʵ��ƽ̨���ڽ������ͱ����ʵ��ѧ��ͬ����֧�ֵ�һ����Ҽ���ѧ��������ʵ��ƻ�����Ŀ����һ�����⡢�����硢���塢������һ���ʵ��ƽ̨���о����ݰ����������������е�ṹ���о����Ƽ�Ч�ʵ��о��Լ��������ܵ��о���
1. ����������ƽ̨��飺
������������Ļ�����ģ��������������Σ�ͷ�����ø��Խṹ�����ϲ��ϡ�����״���������ͣ�ģ��������ͷ����״�ʹ�С����������ͷ���ڲ��ռ��ﰲװ��Դ�����Ƶ�·��������ͷ�������۴�����ͷǰ����ƫ�²లװ��3 �����������������һ��̽����ǰ������������Ĵ��������磬��������������ϵĹ��ܡ�
����ʹ�����Ͻ���������Ǽܰ��������������������Ǽ�֧�������ڶ�����������Ƥ���㹹�����˻����������������ؽڵ�����ϵͳ��ʹ�����Ͻ����������Ӽ�������ͨ���������ӵķ�ʽ�̶����ڸ�����ͷ�ϣ�����������Ƥʹ�����۽�ճ����ͷ�ϣ������㹹���˻��������������������ͼ1 ��ʾ��ʵ��֤�������ַ��������У��ҷ����ж����װ��

���������㼼��ָ�꣺Ѳ���ٶȣ�1.2~1.5m./s��ȫ����Ѳ�ξ��룺4.5~5.5 ǧ�ף�ת��뾶��15~20cm��
2��ϵͳ��ɼ�����ԭ����
�����ӹ����Ͽ������������ϵͳ���Էֳ�����飬�ֱ��ǣ���֪��������������Ϊ������֪����Ӧ�Ŷ������������������ģ�飬��������ָ��������оƬ(MCU),��������Ӧ�Ŷ��������ɵ����ؽ�����ϵͳ��������ͼ2��ʾ����ϵͳ������Ҫ�Ĺ��������ڶԶ�����Э�����ƣ������ҪΧ�ƶ���Ŀ��ƹ�������ϸ���꾡�Ľ��ܡ�

3 ����Ŀ���
3.1 ����Ĺ���ԭ����
���������Ҫ�����¼���������ɣ����̡����ٳ����顢������λ����λ�÷�����λ�ƣ���ֱ���������������Ƶ�·��ȡ��乤��ԭ�������Ƶ�·����������ź��ߵĿ����źţ�����ֱ�����ת����ֱ���������һϵ�г����飬���������������һ�����Եı�����λ���������õ�λ���������ת���ĽǶȦ� ת���ɱ����ĵ�ѹ���������Ƶ�·�����Ƶ�·����������Ŀ��������źűȽϣ�������ƫ���壬������������������ת����ʹ����������λ��������ֵ������������������Ϊ0���Ӷ��ﵽʹ�����ȷ��λ��Ŀ�ġ������һ�����ͱջ�����ϵͳ���乤��ԭ����ͼ3 ��ʾ��

��������������߹�����������ɫ�м䣬�ǵ�Դ�ߣ�һ�ߺ�ɫ���ǵ��ߣ��������߸�����ṩ���������Դ��֤����Ҫ�ǵ����ת�����ġ���Դ�����ֹ��һ��4.8V��һ��6.0V���ֱ��Ӧ��ͬ��ת�ر�������һ�����ǿ����ź��ߣ�һ��Ϊ��ɫ��
3.2 ������Ͷ����ĽǶȿ���
3.2.1 ������ĽǶȿ��ƣ�
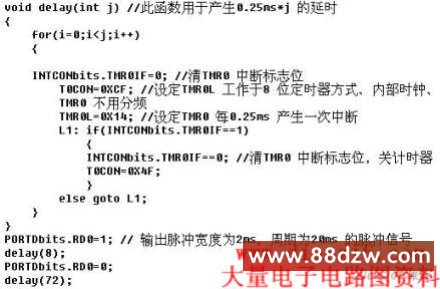
�����ɶ���Ĺ���ԭ����֪�����������һ��������20ms ���ң����������0.5ms ��2.5ms ֮��������������źţ�������������ﵽ-90�㵽90�� ֮���ת�ǣ������Ա仯�������������ת�������ı䣬���������ᶼ�ᱣ����һ�����Ӧ�ĽǶ��ϣ�ֱ�������ṩһ��������ȵ������źţ��Ż�ı�����Ƕȵ��µĶ�Ӧ��λ���ϡ�ͨ����̣�������Ƭ��������˿ڵõ���Ҫ�������������źš�
��������ʾ����������Ϊ��4MHZ�������PORTDbits.RD0 �����
������PIC��Ƭ���ķ���������Ķ�����ơ��������
- › ����PIC��FSK��ASK������շ��������
- › ����PIC��Ƭ��������ʽ����Ǧ���س�������
- › ����PIC��Ƭ���Ļ����������ֵĿ���ϵͳ
- › ����PIC18Fϵ�е�Ƭ����Ƕ��ʽϵͳ���
- › ����PIC��Ƭ������Ǵ����������
- › ����PIC��Ƭ����Ƕ��ʽCAN���ܽڵ㼰����PC��ͨ��
- �ڰٶ�������������£�����PIC��Ƭ���ķ���������Ķ������
- �ڹȸ�������������£�����PIC��Ƭ���ķ���������Ķ������
- ��soso������������£�����PIC��Ƭ���ķ���������Ķ������
- ���ѹ�������������£�����PIC��Ƭ���ķ���������Ķ������
- ���칦��
- ��Ƭ��ѧϰ
- ��س����
- ��ѹ��Դ
- �Զ�����
- ����������
- �ƹ���Ƶ�·
- ��·���
- PCB���
- CAD CAM
- ����ư�
- ��е�ӹ�
- ʴ����ӡ
- �Ʋ�Ϳ��
- ��·����Ƭ
- ��ҵ��
- �繤����֪ʶ
- ��������
- ��������
- ���ӻ���֪ʶ
- �������
- ��ȫ����֪ʶ
- ¥�����
- ���ӵ�
- ���ܽ���
- �ۺϲ���
- ��Ϣ��ʾ���缼��
- �ӿڶ���
- �����
- EDA/PLD
- ��������EMC
- ������
- ��·����
- ���ɵ�·
- RF��Ƶ
- armǶ��ʽ
- ��Դ����
- FPGA
- ���Ƽ���
- Ƕ��ʽϵͳ
- ģ����Ӽ���
- �������
- ���ӵ�·ͼ
- ��������
- �� Microchip��Ƭ��ϵ������12λADC����
- �� Microchip����2 MHz����������
- �� ��8051��Ƭ��Ӧ��ϵͳ��ʹ��DiskOnChip
- �� Microchip��12��ȫ�¸�����8λ���浥Ƭ��
- �� AT91ϵ���������������̵ķ�����ʵ��
- �� 16λ������L80C186-10���Լ����о�
- �� NCP5381˫Ե�������ٻ��յ��ӡ���Top 1
- �� �Ƴ��Լ��Ļ���x86�Ķ���Ƕ��ʽϵͳ(��)
- �� X86��������Ƕ��ʽӦ���е�������
- �� һ�ֻ���C51�Ķ�������Ƽ�Ӧ��