


 当前位置:
当前位置:智能循迹小车硬件设计及路径识别算法
[10-10 20:38:44] 来源:http://www.88dzw.com 单片机学习 阅读:8370次
文章摘要:摘要:设计用于全国大学生智能汽车竞赛用的循迹小车,摄像头采集黑线引导线的位置,直流电动机驱动小车后轮,舵机作为转向驱动。根据实际应用环境,提出用于循迹的图像处理方法,以排除黑线引导线以外物体的干扰,同时提出一种适应力强的小车循迹策略。实验表明,在这种控制策略下,小车运行稳定,能够排除各种干扰,并且能够使小车维持很高的速度行驶。关键词:循迹;单片机;图像处理 全国大学生智能汽车竞赛要求在组委会提供统一智能车竞赛车模、单片机MC9S12DG128开发板、开发软件Code Warrior和在线调试工具的基础上,制作一个能够自主识别路线的智能车,它将在专门设计的跑道上自动识别道路行驶。中心目标是
智能循迹小车硬件设计及路径识别算法,标签:单片机开发,单片机原理,http://www.88dzw.com摘要:设计用于全国大学生智能汽车竞赛用的循迹小车,摄像头采集黑线引导线的位置,直流电动机驱动小车后轮,舵机作为转向驱动。根据实际应用环境,提出用于循迹的图像处理方法,以排除黑线引导线以外物体的干扰,同时提出一种适应力强的小车循迹策略。实验表明,在这种控制策略下,小车运行稳定,能够排除各种干扰,并且能够使小车维持很高的速度行驶。
关键词:循迹;单片机;图像处理
全国大学生智能汽车竞赛要求在组委会提供统一智能车竞赛车模、单片机MC9S12DG128开发板、开发软件Code Warrior和在线调试工具的基础上,制作一个能够自主识别路线的智能车,它将在专门设计的跑道上自动识别道路行驶。中心目标是,在不违反大赛规则的情况下以最
短时间跑完单圈赛道。
本文主要对车模整体设计思路、硬件与软件设计及车模的装配调试过程作简要的说明。
1 整体设计
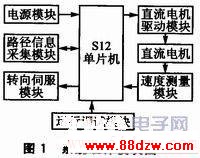
系统按照功能划分为:电源模块、单片机控制系统模块、运行调试模块、路径识别模块、直流电机驱动模块、舵机转向模块、速度测量模块等。图1是小车系统硬件模块图。本文重点介绍路径识别模块、直流电机驱动模块、舵机转向模块、速度测量模块。
1.1 路径识别模块
路面信息检测模块要能够实现检测路径参数。将面阵CMOS用于赛道参数检测的方案,充分利用S12单片机内部硬件资源ATD模块,直接采集CMOS输出的模拟信号,可以获得满足参数检测需要的图像,计算出赛道参数,进而完成路面信息检测。检测路径传感器采用CMOS图像传感器。普通CMOS传感器图像分辨率都在300线之上,远大于光电管阵列。
通过镜头,可以将车模前方很远的道路图像映射到CMOS器件中,从而得到车模前方很大范围内的道路信息。对图像中的道路参数进行检测,不仅可以识别道路的中心位置,同时还可以获得道路的方向、曲率等信息。利用CMOS器件,通过图像信息处理的方式得到道路信息,可以有效控制车模运动,提高路径跟踪精度和车模运行速度。
1.2 直流电机驱动模块
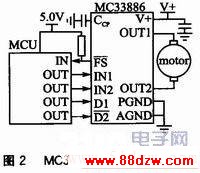
为了利用单片机实现对主电机的控制,使用Motorola公司的H桥芯片MC33886。该芯片的供电电压在5~40 V之间,MOSFET管的导通电阻为120 mΩ,控制信号的输入兼容TTL/CMOS电平,PWM的最高频率可达10 kHz,同时具有短路保护功能和故障信号的输出。
MC33886的应用示意图如图2所示。图中,V+是为直流电机供电的电源。IN1和IN2两个逻辑电平输入端分别控制输出端OUT1和OUT2。当IN1输入高电平时,OUT1输出也为高电平——即通过H桥与V+导通;当IN1输入低电平时,OUT1输出也为低电平——即通过H桥与GND导通。IN2和UT2的关系与此相同。FS为故障信号开漏极输出,低电平有效。当D1是高电平或者D2是低电平时,同时禁用OUT1和OUT2的输出,使OUT1和OUT2同时变为高阻态。通过控制IN1和IN2的电平,即可控制电机正转、反转、停转。对IN1和IN2的电平信号进行脉宽调制,即可控制电机的转速。
《智能循迹小车硬件设计及路径识别算法》相关文章
- › 智能循迹小车硬件设计及路径识别算法
- › 自制一款有趣好玩的智能循迹小车
- 在百度中搜索相关文章:智能循迹小车硬件设计及路径识别算法
- 在谷歌中搜索相关文章:智能循迹小车硬件设计及路径识别算法
- 在soso中搜索相关文章:智能循迹小车硬件设计及路径识别算法
- 在搜狗中搜索相关文章:智能循迹小车硬件设计及路径识别算法