


 当前位置:
当前位置:无传感器BLDC驱动控制系统的设计
[10-10 20:42:03] 来源:http://www.88dzw.com 电子制作 阅读:8619次
文章摘要:近年来,国内市场上电动车使用的电机主要有三种:有刷电机、有位置传感器无刷电机和无位置传感器无刷电机。使用有刷直流电机容易解决换相问题,但是噪音大,而且碳刷容易磨损或损坏,这会增大维护、维修难度,增加使用成本;使用有传感器无刷直流电机容易确定转子位置,解决换相问题,但却增大了电机的设计、制造和安装难度,也增加了成本,并且传感器容易损坏,导致电机的使用寿命缩短;无传感器无刷直流电机换相虽然在技术上有难度,但在成本和寿命上更容易满足消费者需求。综合以上特点,本文讨论的方案选择了性价比较高的无传感器无刷直流电机,以HT46R6?为主控芯片,用反电势法(back electromotive force)
无传感器BLDC驱动控制系统的设计,标签:电子小制作,http://www.88dzw.com近年来,国内市场上电动车使用的电机主要有三种:有刷电机、有位置传感器无刷电机和无位置传感器无刷电机。使用有刷直流电机容易解决换相问题,但是噪音大,而且碳刷容易磨损或损坏,这会增大维护、维修难度,增加使用成本;使用有传感器无刷直流电机容易确定转子位置,解决换相问题,但却增大了电机的设计、制造和安装难度,也增加了成本,并且传感器容易损坏,导致电机的使用寿命缩短;无传感器无刷直流电机换相虽然在技术上有难度,但在成本和寿命上更容易满足消费者需求。
综合以上特点,本文讨论的方案选择了性价比较高的无传感器无刷直流电机,以HT46R6?为主控芯片,用反电势法(back electromotive force)实现电机正常换相,软硬结合,使电动车驱动系统工作在最佳状态,从而提高产品的可靠性和使用寿命。
系统工作原理
控制系统结构框图如图1所示,主要由MCU、直流无刷电机、LCD液晶显示屏、键盘、电源、时钟等模块组成。其中MCU采用台湾Holtek公司生产的HT46R6?微处理器,以它作为系统核心,连同一些外围硬件,并配合软件共同控制直流无刷电机,从而实现该驱动系统的优良性能。例如通过MCU指令控制电机的正反转、调速、刹车或制动等。根据电机所转圈数计量行程,并以数字形式呈现在液晶屏上,通过键盘操作方便查看行程以及其它系统信息。电源模块主要用于在不需要显示时切断相应部分电路,同时保存关键信息,以降低系统功耗。
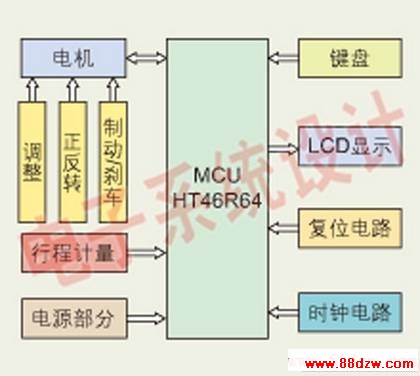
图1:驱动系统结构框图。
由图1可以看出,本驱动控制器的主要功能大致分为三个部分:电机部分、行程计量以及LCD显示,本文主要围绕无传感器电机的换相问题展开。
1. 反电势换相原理
霍尔传感器在电机中使用广泛,带位置传感器直流无刷电机就是靠霍尔传感器来确定转子位置,以使定子各相绕组顺序导通实现换相;而无传感器直流无刷机则是利用电子线路代替位置传感器(图2),通过检测电机在运行过程中产生的反电势过零点来确定转子位置,实现换相,下面以星形绕组为例进一步说明。
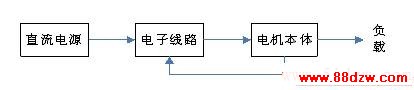
图2:用电子线路代替传感器结构框图。
电机在运行过程中要经过6次换相,每次换相时总有一相绕组未通电,此时可以在该相绕组端口检测到绕组产生的反电势,反电势在60°电角度内是连续的。由于电机的规格、制造工艺有差异,导致相同电角度的反电势值不同,如果要通过检测反电势的数值来确定转子位置,难度非常大,因此必须找到该反电势与转子位置的关系,才能确定转子位置。由图3可知,反电势在60°的电角度过程中总有一次经过坐标横轴(过零点),而此处的电角度和下一次换相点的电角度正好相差30°,故可通过检测反电势过零点,再延时30°换相。本设计是从被检测相断电开始计时等待反电势过零点,再延时等待相应时间,实现换相。
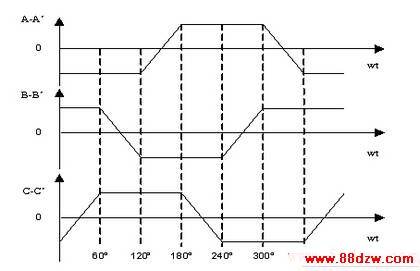
图3:电机运行时各相产生的反电势示意图。
以正向反电势检测为例,假设之前是CB通电,测A相反电势过零点,有过零点信号后等待相应时间,由139译码器开通A+,同时自动关闭C+,就转换成了AB通电;再测C相反电势,用同样的方法,开通C-,自动关闭B-,转换成AC通电;再测B相反电势,开通B+,关闭A+,转换成BC通电;再测A相反电势,开通A-,关闭C-,转换成BA通电;接着测C相反电势,开通C+,关闭B+,转换成CA通电;然后测B相反电势,开通B-,关闭A-,转换成CB通电。经过AB→AC→BC→BA→CA→CB六次换相实现直流无刷电机的连续正转;同理,反电势法经过CA→BA→BC→AC→AB→CB六次换相可实现电机的连续反转。
《无传感器BLDC驱动控制系统的设计》相关文章
- › 无传感器BLDC驱动控制系统的设计
- › 单片机C868实现无传感器BLDC电机控制
- 在百度中搜索相关文章:无传感器BLDC驱动控制系统的设计
- 在谷歌中搜索相关文章:无传感器BLDC驱动控制系统的设计
- 在soso中搜索相关文章:无传感器BLDC驱动控制系统的设计
- 在搜狗中搜索相关文章:无传感器BLDC驱动控制系统的设计