


 当前位置:
当前位置:基于FPGA的磁浮轴承控制系统研究
[09-12 18:26:31] 来源:http://www.88dzw.com EDA/PLD 阅读:8809次
文章摘要:3 磁浮轴承系统仿真一般的磁轴承系统的结构示意图如图1所示,由图可见,轴向磁浮轴承主要借助轴向电磁铁对转子的电磁吸力来平衡转子自身的重量,同时对转子的轴向运动进行约束。轴向轴承主要承载的是转子本身的自重,属于单方向静态载荷,而其动态载荷相对较小,故可采用单边工作方式的圆盘电磁铁系统。图2为轴向磁铁/推力盘悬浮系统转化的简易结构图。图中,x0为轴向轴承在平衡位置的间隙,i0,ic分别为电磁铁线圈的偏置电流和控制电流,F为电磁铁对转子所产生的电磁力。在图2所示的简化模型中,其磁铁和推力盘间总的吸力为:由于有电磁力F∝i(t)2/x(t)2,其中i(t)为激磁电流,x(t)为对应气隙,因此,要使转子
基于FPGA的磁浮轴承控制系统研究,标签:eda技术,eda技术实用教程,http://www.88dzw.com3 磁浮轴承系统仿真
一般的磁轴承系统的结构示意图如图1所示,由图可见,轴向磁浮轴承主要借助轴向电磁铁对转子的电磁吸力来平衡转子自身的重量,同时对转子的轴向运动进行约束。轴向轴承主要承载的是转子本身的自重,属于单方向静态载荷,而其动态载荷相对较小,故可采用单边工作方式的圆盘电磁铁系统。图2为轴向磁铁/推力盘悬浮系统转化的简易结构图。图中,x0为轴向轴承在平衡位置的间隙,i0,ic分别为电磁铁线圈的偏置电流和控制电流,F为电磁铁对转子所产生的电磁力。
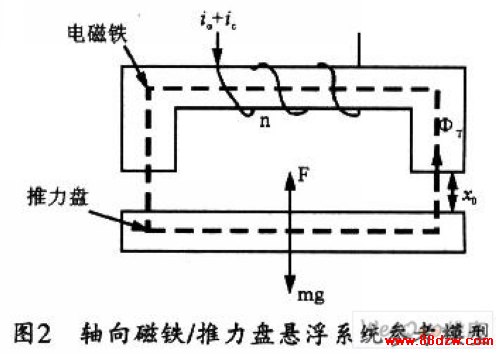
在图2所示的简化模型中,其磁铁和推力盘间总的吸力为:

由于有电磁力F∝i(t)2/x(t)2,其中i(t)为激磁电流,x(t)为对应气隙,因此,要使转子稳定悬浮在平衡位置,必须满足f=F-mg=0。假设输入初始电流为i0,转子与电磁铁间的气隙为x0,如将转子作为单质点总集中质量来处理,那么,当转子质心在Y方向上有向上的偏移量X时(转子仅存在平移,无干扰力存在),其转子的中心运动方程可表示为:

事实上,轴向磁铁和径向磁铁具有相同的线性化数学模型,只是电流刚度和位移刚度不同,因此,轴向和径向可采用相同的控制方法。
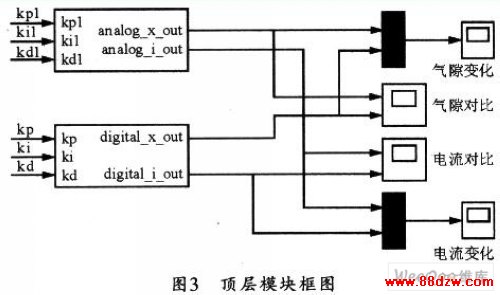
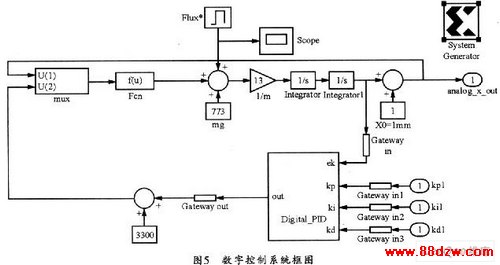
在模拟控制系统中,控制器最常用的控制是PID控制,PID控制由于其自身的优点,在工业生产过程中仍然得到了广泛的应用。模拟PID控制器主要由三个典型的环节组成,即比例环节(P)、积分环节(I)、微分环节(D)。根据上述磁轴承系统的数学模型,可在Matlab环境下采用Simulink仿真工具对磁浮轴承轴向系统进行仿真,以观察其输出响应曲线。仿真数据取自实际磁浮轴承实验装置。由于电磁轴承本身要应用到实际生产当中去,因此,和普通的电机一样,在工作过程中经常会遇到负载变化的情况。如风机、冲床和铣床等应用中存在轴向径向的加载和减载等。下面以轴向轴承为例来分析加载和减载对系统的影响。为了方便进行模拟和数字的对比,首先可建立如图3所示的顶层模块,其中模拟控制系统仿真框图如图4所示,数字控制系统的仿真框图如图5所示。


在本系统的仿真中,其数字PID使用xilinx提供的模块集(blockset)构建而成,如图6所示。
上述仿真中,偏磁电流i0为3.3 A(为仿真方便,取3.3 A并扩大1 000倍),平衡气隙x0为1mm,磁极的截面积S为10 500 mm2,电磁线圈匝数为150匝,真空磁导率μ0为4π×10-7 Vs/Am,另外,取:mg=733 N,1/m=0.013(为仿真方便,扩大1000倍),kp=8 800,ki=18.5,kd=1 000 000,kp1=9 000,ki1=220 000,kd1=50,T=2×10-5。
《基于FPGA的磁浮轴承控制系统研究》相关文章
- › 基于FPGA的单片彩色LCD投影机设计
- › 256级灰度LED点阵屏显示原理及基于FPGA的电路设计
- › 基于FPGA的LCD%26amp;VGA控制器设计
- › 基于FPGA的信道化接收机
- › 基于FPGA和SMT387的SAR数据采集与存储系统
- › 基于FPGA的栈空间管理器的研究和设计
- 在百度中搜索相关文章:基于FPGA的磁浮轴承控制系统研究
- 在谷歌中搜索相关文章:基于FPGA的磁浮轴承控制系统研究
- 在soso中搜索相关文章:基于FPGA的磁浮轴承控制系统研究
- 在搜狗中搜索相关文章:基于FPGA的磁浮轴承控制系统研究