


 当前位置:
当前位置:一种用于光盘伺服控制系统的通用滤波器的设计
[09-13 17:05:08] 来源:http://www.88dzw.com 控制技术 阅读:8142次
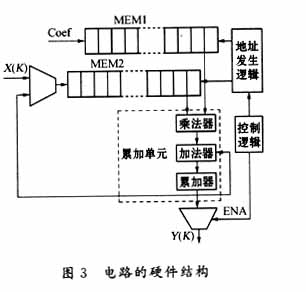
文章摘要:运算单元采用算术累加器(MAC)实现。MAC由乘法器和加法器组成,其中,乘法器因为速度的限制,通常采用基于查找表(LUT)的并行分布算法(DA)实现,但该算法占用硬件资源较多,对实现的滤波器的阶数有一定限制,在本电路中不宜采用。在综合考虑面积和速度两方面因素后,最终选用Booth乘法器实现。整个电路的硬件结构图如图3所示。 其控制逻辑中的配置寄存器(32bits)设计如表1所示。 需要特别说明的是,在对MEM1和MEM2存放数据时,滤波器系数和X(k)、Y(k)必须是一一对应的,从而使每次读数据时的读地址相同,简化寻址单元的设计。滤波器的运作是由状态机(逻辑单元)控制的,流程如下:(1)初始化
一种用于光盘伺服控制系统的通用滤波器的设计,标签:计算机控制技术,工厂电气控制技术,http://www.88dzw.com运算单元采用算术累加器(MAC)实现。MAC由乘法器和加法器组成,其中,乘法器因为速度的限制,通常采用基于查找表(LUT)的并行分布算法(DA)实现,但该算法占用硬件资源较多,对实现的滤波器的阶数有一定限制,在本电路中不宜采用。在综合考虑面积和速度两方面因素后,最终选用Booth乘法器实现。整个电路的硬件结构图如图3所示。
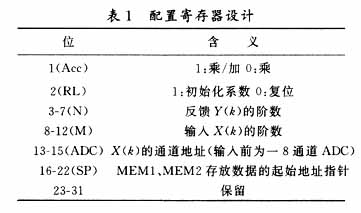
其控制逻辑中的配置寄存器(32bits)设计如表1所示。
需要特别说明的是,在对MEM1和MEM2存放数据时,滤波器系数和X(k)、Y(k)必须是一一对应的,从而使每次读数据时的读地址相同,简化寻址单元的设计。滤波器的运作是由状态机(逻辑单元)控制的,流程如下:
(1)初始化系数存储单元,根据SP算出X(k)、Y(k)在MEM2中的分界地址SP+N和SP+M+N;
(2)从MEM1、MEM2的(SP+j)单元读出数据送MAC计算,MEM2读出的数据写回(SP+j-1)单元,j为0时的数据无效,不写回;当j为M+N时,转步骤(4);
(3)j加1,重复步骤(2);
(4)一次Y(k)计算完成。将当前ADC的输入写回到MEM2的(SP+M+N)单元;
(5)将本次计算所得的Y(k)送SP+M,j复位为0,重复步骤(2)。
3 实现与仿真
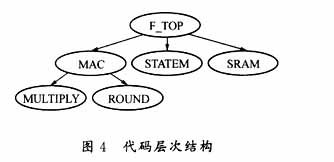
按照上述设计思想,用Verilog对系统进行RTL描述,代码层次结构如图4所示,其中,F―TOP为顶层wrapper模块,连接MAC、STATEM、SRAM三个子模块。MAC实现图3中虚线所示的Booth乘加器,得到的乘积为32 bits数,然后经过舍入调整(rounding)将其转化为16 bits数;STATEM模块实现上文提到的控制流程;SRAM模块由系数SRAM和数据SRAM(存放X(k)、Y(k))组成,分别对应图3的MEM1、MEM2,为了方便后面的验证,直接调用Xilinx的SRAM单元RAMB4―S8―S8。
代码使用synopsys VCS进行仿真,通过debussy的PLI接口生成fsdb波形文件。在debussy中对波形(图5所示是波形仿真图)进行分析。当前的配置寄存器的值为0x0000018f,为三阶IIR滤波器。READ―EN为读使能信号,低电平有效。STATE―WE―LOC为写使能信号,低电平有效。RADDR―LOC和WADDR―LOC是存储单元的地址,地址范围从0到5,与三阶IIR滤波器对应;当WADDR―LOC为5时,写入的是X(k),下一时钟周期变为2,写入Y(k)(标尺线所对的值0x000a,已经过rounding处理)。XIN―LOC和YIN―LOC是MAC的输入数据。STATE―LOC和YIN―LOC是MAC的输入数据。CUR―STATE为状态机的状态变化,可以看出,与前面的状态含义和状态机实现策略一致。这里,读写地址在整个运算过程中都占用两个时钟周期是为了保证MAC运算的正确完成,当X(k)和计算所得的Y(k)写回时,不涉及MAC运算,因此,只分配一个时钟周期。
为了确保滤波器以及整个控制系统设计的正确性,我们选用Xilinx Spartan2的XC2S50系列做FPGA验证。首先,在synplify中生成网表文件(edf),然后,通过Xilinx ISE生成带延时信息的单元网表文件(v)和线延时文件(sdf),用于在VCS中进行后仿真,最后生成FPGA下载文件(bit)。XC2S50硬件占用情况如表2所示。表2所示是FPGA资源分配表。
- 上一篇:电力变压器的正确使用与节能措施
《一种用于光盘伺服控制系统的通用滤波器的设计》相关文章
- › 一种用于光盘伺服控制系统的通用滤波器的设计
- › 一种用于三相三线制电源缺相保护电路图
- 在百度中搜索相关文章:一种用于光盘伺服控制系统的通用滤波器的设计
- 在谷歌中搜索相关文章:一种用于光盘伺服控制系统的通用滤波器的设计
- 在soso中搜索相关文章:一种用于光盘伺服控制系统的通用滤波器的设计
- 在搜狗中搜索相关文章:一种用于光盘伺服控制系统的通用滤波器的设计