


 当前位置:
当前位置:直流电机位置伺服系统驱动器设计
[09-08 11:50:54] 来源:http://www.88dzw.com 单片机学习 阅读:8806次
文章摘要:摘要:介绍了两个以AT89S51芯片为核心的智能自动小车设计。第一个方案采用H桥电路,通过红外光电传感器对地面状态进行判断并把信号传送到CPU进行相关运算。整个系统能完成小车的正向和反向运行,并有定时倒车等功能。第二个方案设计的光电电动小车能够实时显示时间、速度、里程,可程控行驶速度、准确定位停车等。关键词:单片机;智能小车;传感器;H桥 方案一设计的自动小车是受到参考文献[1]的启发,在原有基础上进行了改进。 原方案[1-2]采用两块单片机(AT89C51和AT89C2051)作为智能小车的检测和控制核心,实现小车识别路线、判断并自动躲避障碍、选择正确的行进路线。驱动电机采用直流
直流电机位置伺服系统驱动器设计,标签:单片机开发,单片机原理,http://www.88dzw.com摘要:介绍了两个以AT89S51芯片为核心的智能自动小车设计。第一个方案采用H桥电路,通过红外光电传感器对地面状态进行判断并把信号传送到CPU进行相关运算。整个系统能完成小车的正向和反向运行,并有定时倒车等功能。第二个方案设计的光电电动小车能够实时显示时间、速度、里程,可程控行驶速度、准确定位停车等。
关键词:单片机;智能小车;传感器;H桥
方案一设计的自动小车是受到参考文献[1]的启发,在原有基础上进行了改进。
原方案[1-2]采用两块单片机(AT89C51和AT89C2051)作为智能小车的检测和控制核心,实现小车识别路线、判断并自动躲避障碍、选择正确的行进路线。驱动电机采用直流电机,电机控制方式为单向PWM控制。电机控制核心采用AT89C2051单片机,控制系统与电路用光电耦合器完全隔离以避免干扰。
本设计采用一块单片机(AT89S52)作为智能小车的检测和控制核心,是一种分布式控制系统的设计方法,分为电机模块、传感器模块和驱动模块三部份。小车模型采用5 V电池驱动,通过改变PWM占空比调速。小车可以在不完全确定的道路环境下,通过自我判断,对周围环境进行探测,并做出相应的反应,如左拐弯、右拐弯和改变速度等,还可以自动后退。目前用在机器人上的多为价格较贵的超声波传感器和红外传感器等,本设计采用价格便宜的反射式光电传感器来完成对周围环境的感知。
1 方案一的设计功能概述
1.1 设计概述
设计并制作一个能自动往返于起跑线与终点线间的小汽车。允许用玩具汽车改装,但不能用人工遥控(包括有线和无线遥控),如图1所示。
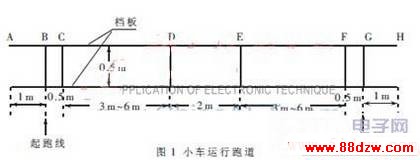
1.2 设计要求
(1)车辆从起跑线出发(出发前,车体不得超出起跑线),到达终点线后停留10 s,然后自动返回起跑线(允许倒车返回)。往返一次的时间应力求最短(从合上汽车电源开关开始计时)。
(2)到达终点线和返回起跑线时,停车位置离起跑线和终点线偏差应最小(以车辆中心点与终点线或起跑线中心线之间距离作为偏差的测量值)。
(3)D~E间为限速区,车辆要求以低速通过,通过时间不得少于8 s,但不允许在限速区内停车。
(4)可以设计自动记录、显示定时时间(记录显示装置要求安装在车上)。
(5)不允许在跑道内外区域另外设置任何标志或检测装置。
(6)车辆(含在车体上附加的任何装置)外围尺寸的限制:长度≤35 cm,宽度≤15 cm。
《直流电机位置伺服系统驱动器设计》相关文章
- › 直流电机无级调速电的制作方法
- › 直流电机双向调速驱动电路
- › 直流电机的稳速保护
- › 如何制作直流电机无级调速器电路
- › 三极管驱动直流电机
- › 大功率直流电机过流保护电路
- 在百度中搜索相关文章:直流电机位置伺服系统驱动器设计
- 在谷歌中搜索相关文章:直流电机位置伺服系统驱动器设计
- 在soso中搜索相关文章:直流电机位置伺服系统驱动器设计
- 在搜狗中搜索相关文章:直流电机位置伺服系统驱动器设计