


 当前位置:
当前位置:格斗机器人使用的电机驱动放大器
[10-10 20:42:03] 来源:http://www.88dzw.com 电子制作 阅读:8779次
文章摘要: 电路图 电机驱动放大器的电路见图1:它基本上由两部分组成,一部分用来产生电流和增加电流负载能力,即放大器部分;另一部分是用于检测原始驱动信号的极性的装置。这是因为机器人模型的速度控制器具有向前、向后运动的功能,信号极性必须被主速度控制器检测到。当主速度控制器信号极性翻转被检测到时,马达电流反向继电器必须接通。 控制信号由主速度控制器来产生。其电源电压必须高于4.5V,最好为5.OV,这样才能保证正常的驱动电流进入放大器。驱动信号由连接器PL1输入,随后馈送到负载电阻R1。对于主速度控制器来说,它部分地仿真马达的作用。与R1并联有两个光电隔离器。其中IC1进行隔离,
格斗机器人使用的电机驱动放大器,标签:电子小制作,http://www.88dzw.com电路图
电机驱动放大器的电路见图1:它基本上由两部分组成,一部分用来产生电流和增加电流负载能力,即放大器部分;另一部分是用于检测原始驱动信号的极性的装置。这是因为机器人模型的速度控制器具有向前、向后运动的功能,信号极性必须被主速度控制器检测到。当主速度控制器信号极性翻转被检测到时,马达电流反向继电器必须接通。
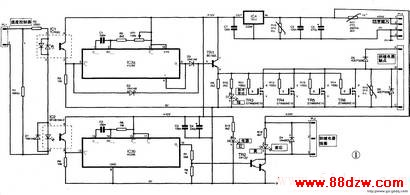
控制信号由主速度控制器来产生。其电源电压必须高于4.5V,最好为5.OV,这样才能保证正常的驱动电流进入放大器。驱动信号由连接器PL1输入,随后馈送到负载电阻R1。对于主速度控制器来说,它部分地仿真马达的作用。与R1并联有两个光电隔离器。其中IC1进行隔离,但允许从主速度控制器来的任何极性的脉冲(交流信号)通过,到后面的电路中进行处理;而IC2则仅当信号极性使光电隔离器的二极管做正向偏置时才允许从主速度控制器来的直流信号通过。
通过IC1的交流信号送给单稳态电路IC3a,其下降沿触发输入管脚5,引起管脚6的输出变高电平一个周期。周期长度由电容C1和组合电阻R5、预置电阻VR1来设置。产生的脉冲宽度值为70 μ s~2.5ms。从管脚6通过二极管D3送到输出控制晶体管TR1。同时二极管D2则绕过IC3a传送主驱动信号到TR1的基极。与D3形成一个明显的'或'门,从而将单稳态电路所产生的脉冲并入到驱动脉冲的后面。晶体管TRl组成一个射极跟随器,并且其射极通过缓冲电阻R10驱动LED管D7,用于指示有脉冲被馈送到场效应管TR3-TR7。二极管D5和D6用于对驱动电路的附加保护,以限制反向传送的信号,并且能够保护电路避免受到马达产生的感应脉冲的影响。元件R19是一个组合的31V压敏电阻,用于限制某些瞬间的正句过电压出现而破坏驱动管。
单稳态电路IC3b仅当向前驱动信号的极性引起IC2导通时接受触发脉冲,并且通过光电隔离器传送此信号。而反向驱动信号则不被其接受。这个单稳态定时时间被设定为大于所使用的RC系统的祯频。在这种情况下,脉冲的重复周期为20ms。但是一旦被触发,由于单稳态电路保持导通的时间被设置为28 ms(由C2和R6决定)。因此,在有机会被关闭之前,会被重复触发。从而保持其输出脚第10脚持续为高电平(导通)。从而提供电流来驱动继电器的驱动器TR2。这是借助于PL2提供电流给驱动马达反转的继电器的一个达令顿晶体管。
本电路中,用来防止临时输入电源电压瞬间超过限制电压31V的是第2个压敏电阻R18。而热敏电阻R17用来限制由于较长时间电压不稳定所引起的超量。
场效应管选择
制作此电路时需要考虑的一个重要问题是:选择驱动马达的场效应管。在同样价格条件下,那些具有较低RDS的管子较好。这里选用的场效应管STW60NE10的RDs仅为16mΩ。另一种管子FGA70N10的RDs为23mΩ。
值得注意的是:虽然每个单独的场效应管的RDS的影响与整个机器人的布线,机器人的动力电池和继电器等的影响相比几乎可以忽略。但性能好的元件的开销总是值得的。样机在格斗中虽然多次被冲撞、旋转,但这个控制器仍保持正常工作。
选择继电器
在使用继电器来实现改变格斗机器人的马达驱动方向的情况下。需要选择适当的继电器。还要注意到本设计中采用24V电源供电。而大多数实际买到的继电器仅有一个25A交流触点,触点寿命预计为100000次动作。此类继电器一般能够在比指定的电流更大的电流下工作,但其使用寿命将会明显缩短。
结构组装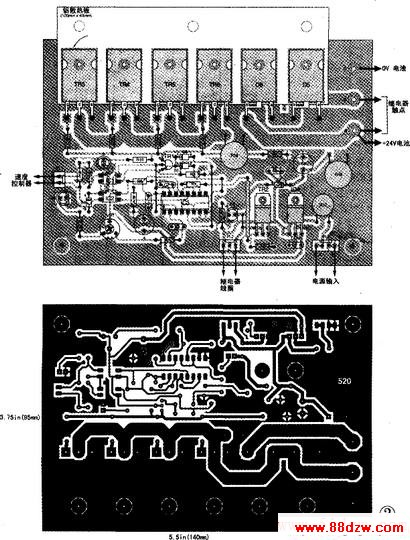
- 上一篇:单片机硬件抗干扰实践经验
《格斗机器人使用的电机驱动放大器》相关文章
- › 格斗机器人使用的电机驱动放大器
- 在百度中搜索相关文章:格斗机器人使用的电机驱动放大器
- 在谷歌中搜索相关文章:格斗机器人使用的电机驱动放大器
- 在soso中搜索相关文章:格斗机器人使用的电机驱动放大器
- 在搜狗中搜索相关文章:格斗机器人使用的电机驱动放大器