


 当前位置:
当前位置:格斗机器人使用的电机驱动放大器
[10-10 20:42:03] 来源:http://www.88dzw.com 电子制作 阅读:8779次
文章摘要: 印刷电路板元件面和引线面的布局详情见图2。此电路板可以在网上从 EPE PCB服务公司购买,代码为520。 机器人的每个马达需要一块板。 首先焊接板上连接线,因为有3 条连线可能会被压敏电阻R19遮住。 注意:连接到TR2左侧的连线需要用 长套管屏蔽住,以避免被TR2的边缘 所切断。要按照从小到大的顺序来安 装其余的元件。最后安装对于静电敏 感的元件,并且需要采取常用的预防静 电措施。场效应管(TR3-TR1)和功率 二极管(D5、D6)要使用散热片和绝缘 垫圈来接触电路板。单稳态电路IC3 要使用插座,但光电隔离器ICl和IC2 不必使用插座。
格斗机器人使用的电机驱动放大器,标签:电子小制作,http://www.88dzw.com印刷电路板元件面和引线面的布局详情见图2。此电路板可以在网上从 EPE PCB服务公司购买,代码为520。 机器人的每个马达需要一块板。
首先焊接板上连接线,因为有3 条连线可能会被压敏电阻R19遮住。 注意:连接到TR2左侧的连线需要用 长套管屏蔽住,以避免被TR2的边缘 所切断。要按照从小到大的顺序来安 装其余的元件。最后安装对于静电敏 感的元件,并且需要采取常用的预防静 电措施。场效应管(TR3-TR1)和功率 二极管(D5、D6)要使用散热片和绝缘 垫圈来接触电路板。单稳态电路IC3 要使用插座,但光电隔离器ICl和IC2 不必使用插座。
一旦组装完成,必须进行一次测 试,由于电路运行需要使用的电源功率 较大,需要花5分钟检查每个电路。特 别注意检查散去大量功率的散热板,以 防止电路被破坏。大的功率可从一对 12V凝胶电池得到。检查电路板,找出 安放位置错误的元件,注意电容和二极 管的极性是否正确。还要检查在焊盘和 布线之间是否有短接的焊锡。
在给电路加电后,需要使用万用 表,按照以下顺序进行进一步的检查:
●在PL3的1脚和4脚之间的 电阻应该大于5kΩ。
●将万用表的正极接到A点。检 查A点和B点,以及A点和C点之 间的电阻。应该读出很高的电阻值。
注意:如果万用表连接方向错误,由 于会使二极管导通,读数会错误。
最主要的是,在散热片和B与C 点之间的电阻应该非常高(开路)。
如果检查出上述问题,在施加全 部电压和负载前应加以解决。
调试
在成功地完成检查后,可以将24V电源加到连接器SK3/PL3的脚1和脚4上,注意极性正确。如果电源没有输出功率限制功能,可以在正极连线上串接一个100Ω、1W的电阻。以防止由于电流过大而引起故障。
在加电时的冲击电流过后,电路电流会降到静态电平,约15mA。检查电源输入端到稳压器IC4之间的电压,应接近于电源电压。稳压器的输出电压应为12V,在100mV内,发光二极管D9点亮,指示电源已经加到电路上。其他的发光二极管D7、D9仍保持关闭状态。
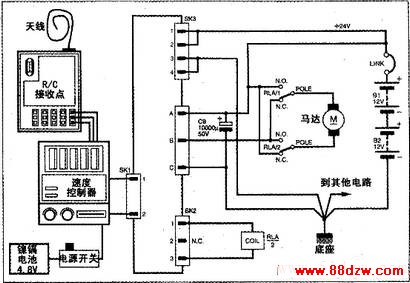
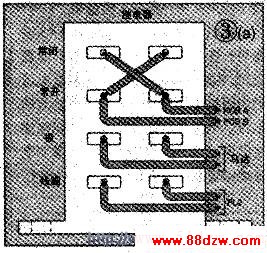
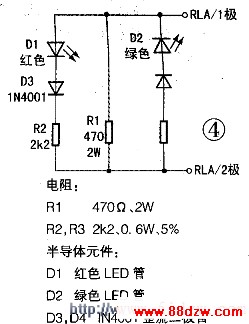
然后,连接无线控制接收器和主速度控制器到放大器的输入端(见图3a)。接上一个测试电路代替马达(见图4)。这些元器件都是临时用导线连接到继电器的接点上。当然,如果允许,可以将其安装在一个支架板上。
电路测试主要是在连接高功率马达和大量电流流过电路之前检查马达驱动器和继电器的连接状况,以避免元件和连线出现任何故障。接通无线电控制设备,将操纵杆放置在中间位置,PCB板上的发光二极管D7和D8仍保持不亮。随后,按照厂家的指令来设置速度控制器的指令。虽然接上了本放 大器,但设置速度控制器的方法与没有放大器时相同,就像使用小马达一样。
- 上一篇:单片机硬件抗干扰实践经验
《格斗机器人使用的电机驱动放大器》相关文章
- › 格斗机器人使用的电机驱动放大器
- 在百度中搜索相关文章:格斗机器人使用的电机驱动放大器
- 在谷歌中搜索相关文章:格斗机器人使用的电机驱动放大器
- 在soso中搜索相关文章:格斗机器人使用的电机驱动放大器
- 在搜狗中搜索相关文章:格斗机器人使用的电机驱动放大器