


 当前位置:
当前位置:格斗机器人使用的电机驱动放大器
[10-10 20:42:03] 来源:http://www.88dzw.com 电子制作 阅读:8779次
文章摘要: 注意,当操纵杆移动出中心位置时,图4测试电路中的一个或多个LED管会与放大器上的LED管D7同步地闪烁和点亮。随着操纵杆逐渐地移开中心位置,此LED管点亮,随后放大器板上的D8也点亮,指示继电器也已经加电。 如果一切正常。就可以安全地切断图4的测试电路,使用100Ω、1W的限流电阻,将驱动马达连接到电路上。要注意,现在电路上要通过较大的电流,必须增加电源功率以适应这一点。如果被测试的设备没有装在机器人上面,马达需要加以固定。还要安装滤波电容C8(图3a)来闭合继电器。 噪声的抑制 驱动马达的端子上产生的噪音需要减少,可以使用少量的元件接在产生噪音的电机整流器上
格斗机器人使用的电机驱动放大器,标签:电子小制作,http://www.88dzw.com注意,当操纵杆移动出中心位置时,图4测试电路中的一个或多个LED管会与放大器上的LED管D7同步地闪烁和点亮。随着操纵杆逐渐地移开中心位置,此LED管点亮,随后放大器板上的D8也点亮,指示继电器也已经加电。
如果一切正常。就可以安全地切断图4的测试电路,使用100Ω、1W的限流电阻,将驱动马达连接到电路上。要注意,现在电路上要通过较大的电流,必须增加电源功率以适应这一点。如果被测试的设备没有装在机器人上面,马达需要加以固定。还要安装滤波电容C8(图3a)来闭合继电器。
噪声的抑制
驱动马达的端子上产生的噪音需要减少,可以使用少量的元件接在产生噪音的电机整流器上,就能够有效地减少噪音发生。见图5所示。电容放置在每个接地端子和电源端之间,能够明显地减少噪音。图中增加的可变电阻器是用来减少此点上超过安全限制的瞬间电压波动。
步骤
本装置组装到机器人中之后,最好在驱动轮离地的状态下做进一步的测试。以便确定电路在施加最小负载情况下,马达向前、向后旋转是否正常。然后,找一块安全区域,将机器人放在地 电阻:R1压敏电阻31VD.C电容:存储lOOn瓷片,间距5mm(30FF)马达24VD.C电源配合使用 上。通过控制器的操作,检查能否正确地向前、向后运动,以及能否直线运动。如果机器人直行时转向某一侧,表明这一侧的马达较弱。可以调整这一侧的马达放大器的预置电阻VR1。直到机器人能够直行为止。顺时针转动VR1将会缩短单稳态电路IC3b的定时时间,而逆时针则会延长脉冲时间。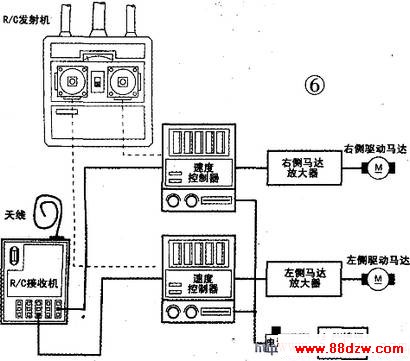
结束语
此电机放大器设计用于格斗用机器人。可以分别装配在由一个手柄控制的左转和右转马达驱动器上(见图6)。这样就允许分别控制左、右马达。从而给机器人以极好的可操作性。试验证明,可以适应运动和静止电流超过80A的状态。此放大器也可以用于单一速度控制器,增加其电流驱动能力,例如:舰船模型中,因此本设计不限于应用在格斗机器人模型中。
在机器人或RC模型中运行本设备时,在加电时继电器出现颤抖或震动时,并非是电路故障。更可能是电源的内阻过高的作用,影响了马达启动.
电流。电源内阻在马达启动时能够使电源电压从24V降低到15V。增加电池能够较好地提供启动电流。
- 上一篇:单片机硬件抗干扰实践经验
《格斗机器人使用的电机驱动放大器》相关文章
- › 格斗机器人使用的电机驱动放大器
- 在百度中搜索相关文章:格斗机器人使用的电机驱动放大器
- 在谷歌中搜索相关文章:格斗机器人使用的电机驱动放大器
- 在soso中搜索相关文章:格斗机器人使用的电机驱动放大器
- 在搜狗中搜索相关文章:格斗机器人使用的电机驱动放大器