


 当前位置:
当前位置:基于微步驱动的开关磁阻电机转矩脉动控制系统
[09-13 17:03:43] 来源:http://www.88dzw.com 控制技术 阅读:8452次
文章摘要:电机正转时:A-AB1-AB2-AB3-B-BC1-BC2-BC3-C-CD1-CD2-CD3-D-DA1-DA2-DA3-A 反转时:A-AD1-AD2-AD3-D-DC1-DC2-DC3-C-CB1-CB2-CB3-B-BA1-BA2-BA3-A图2(8/6)SRM细分绕组理想电流波形在SRM转子位置检测中,由光电旋转编码器检测转子位置产生较高分辨率的数字信号。如转子每旋转一周(360度)能产生N个信号,则称其为Np/r(脉冲/转)。把N个脉冲信号细分,每转过N/96个脉冲调整一次相绕组电流大小,使转子的一个大步距角细分成4个小的步距角。从而使电流用换相区代替换相点,即在换相时关断
基于微步驱动的开关磁阻电机转矩脉动控制系统,标签:计算机控制技术,工厂电气控制技术,http://www.88dzw.com电机正转时:A-AB1-AB2-AB3-B-BC1-BC2-BC3-C-CD1-CD2-CD3-D-DA1-DA2-DA3-A
反转时:A-AD1-AD2-AD3-D-DC1-DC2-DC3-C-CB1-CB2-CB3-B-BA1-BA2-BA3-A
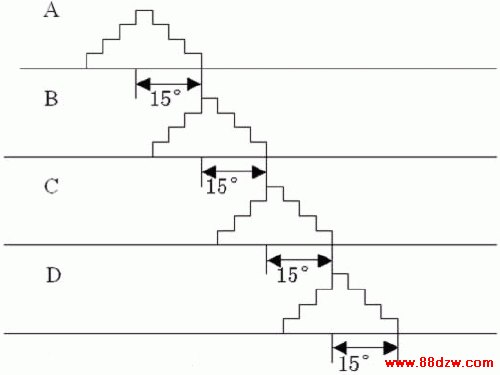
图2(8/6)SRM细分绕组理想电流波形
在SRM转子位置检测中,由光电旋转编码器检测转子位置产生较高分辨率的数字信号。如转子每旋转一周(360度)能产生N个信号,则称其为Np/r(脉冲/转)。把N个脉冲信号细分,每转过N/96个脉冲调整一次相绕组电流大小,使转子的一个大步距角细分成4个小的步距角。从而使电流用换相区代替换相点,即在换相时关断相电流不是立即关断到零,而是按阶梯下降;导通相也并不是立即导通,而是按阶梯逐渐导通。阶梯的宽度 即PWM脉宽占空比由32个脉冲转过的时间决定。
控制系统原理如图3所示,实际转速与给定转速相比较产生的偏差信号通过调节器经过PID运算产生给定转速对应PWM脉宽占空比Y,同时根据转子位置脉冲查表对应平衡位置转矩角θ对应的正余弦值,经过算术运算求得实时通电相PWM占空比幅度Ya、Yb,即控制了通过SRM绕组的有效电流大小。
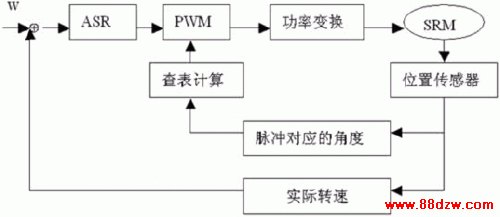
图3 SRM细分驱动控制原理图
五、实验与结论
本文论述的微分驱动SRM的控制策略在具体实施阶段,选用了Microchip公司的PIC18F2331高档八位单片机,该芯片内部集成了丰富的外设资源,其中功率控制PWM模块、CCP模块、A/D模块、光电编码器接口(QEI)等为SRM的控制提供了方便。
利用CCP模块的捕捉模式,当转子位置信息脉冲符合设定的条件时(上升沿或下降沿出现),中断标志位CCP1IF被硬件自动置位,产生一次CCP1捕捉中断。将TMR1的计数值传送到CCPR1寄存器。根据计数值可计算电机转速。
在PIC18F2331中,功率控制PWM模块支持三个PWM发生器和六个输出通道。在本系统中,功率变换部分采用半桥式电路,相与相之间完全独立,每相需要一个IGBT作为主开关器件,所以只要选用两个PWM发生器和四个输出通道即可满足电机的驱动控制。
A/D模块为10位高速转换器,可通过寄存器设置芯片的工作电压作为A/D转换的参考电压(即使用VCC为参考电压)。则模拟信号的输入范围为0~VREF。
相电流采样选用霍尔电流传感器采样电流信号,霍尔电流传感器本身已存在滤波电路,输出可直接提供给单片机的A/D模块。
在本控制系统中采用了光电编码器测量转子位置,作为闭环控制的反馈量。PIC18F2331提供了这种编码器的接口电路,编码脉冲通过2个引脚QEA和INDX 输入到芯片内部作为输入时钟,时钟信号使位置计数器寄存器(POSCNT)递增。此寄存器的工作模式决定了是在QEA 输入沿递增。如果与周期寄存器MAXCNT 匹配该寄存器复位。如果允许位置计数器中断,当POSCNT复位时会产生一个中断。
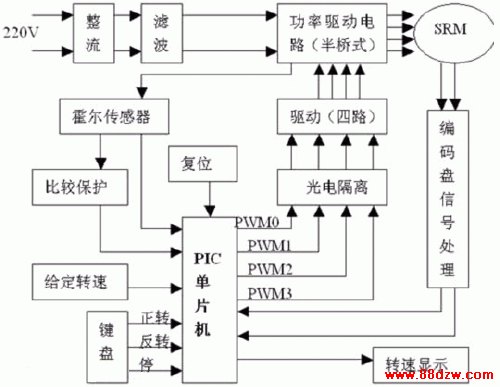
由于本系统采用了外设资源集成度比较高的PIC单片机,所以硬件电路比较简单。 系统框图如下:
- 上一篇:基于PLC的高炉槽下控制系统
《基于微步驱动的开关磁阻电机转矩脉动控制系统》相关文章
- › 基于微步驱动的开关磁阻电机转矩脉动控制系统
- 在百度中搜索相关文章:基于微步驱动的开关磁阻电机转矩脉动控制系统
- 在谷歌中搜索相关文章:基于微步驱动的开关磁阻电机转矩脉动控制系统
- 在soso中搜索相关文章:基于微步驱动的开关磁阻电机转矩脉动控制系统
- 在搜狗中搜索相关文章:基于微步驱动的开关磁阻电机转矩脉动控制系统